
Description
Small calibration sphere is made for robot guidance calibration software Robotic 3D Vision Toolbox(sold separately)
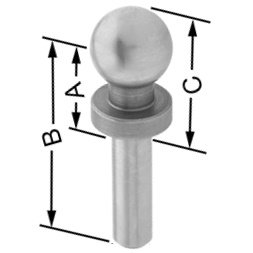
Dimension: See drawings (unit: mm)
Diameter = 12mm
Length A = 12mm
Length B = 22mm
Length C = 18mm
Shank Diameter: Thread Size 6-32 Thread Length 1/4″
Robot Guidance Calibration
Many robot vendors provide TCP (Tool Center Point) calibration and UF (User Frame) calibration functionality in the teaching pendant, making it possible to interact with objects using an EOAT (End Of Arm Tool). However, when robots work with vision sensors (snapshot/profile sensors), the calibration requires solving homogeneous transform equations because the origin of the sensor coordinate frame is not tangible.
Robotic 3D Vision Toolbox provides a handy way to perform TCP/UF calibrations in the following scenarios:
- TCP Calibration: A snapshot/profile sensor is mounted on an active robot. The transformation from the robot flange to the sensor origin is calculated.
- UF Calibration: A snapshot/profile sensor is mounted on the wall, ceiling, or other fixtures. The transformation from the robot base to the sensor origin is calculated.

Check out our 3D machine vision software to see how we can help you improve manufacturing quality and reduce waste and time here
